L'accéléromètre MPU6050
Introduction
Le MPU6050 est un accéléromètre et gyroscope mesurant l'accélération dans les trois axes ainsi que la rotation autours ces trois axes. Le module utilise l'interface I2C.Exercice 1 : Comprendre le bus I2C
Lire la documentation du bus I2C et les fiches techniques du MPU6050:- I2C tutorial

- accès à I2C avec MicroPython ( documentation I2C de MicroPython)
Exercice 2 : Trouver les modules I2C sur le bus
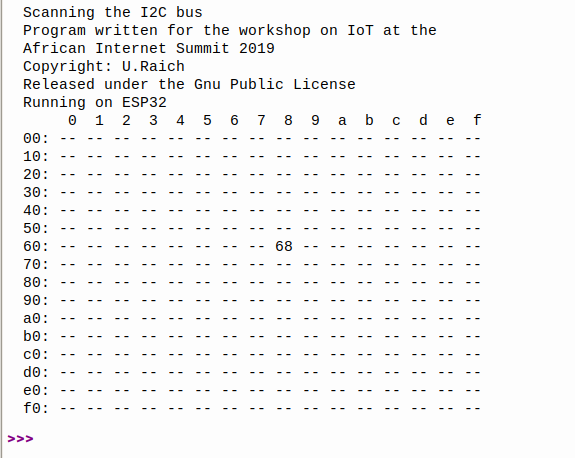
Écrire un programme qui imprime les adresses de toutes le modules présent sur le bus I2C. Ce programme sera utilisé pour tous les modules I2C qui seront utilisé dans le cours. Pour cette raison, le programme doit être soigneusement vérifié. Le résultat du programme doit être formaté comme suit : La copie d'écrans montre un MPU6050 avec l'adresse I2C de 0x68 connecté sur le bus I2C.
La copie d'écrans montre un MPU6050 avec l'adresse I2C de 0x68 connecté sur le bus I2C.
Exercice 3 : Le registre WHO_AM_I
Initialiser le MPU6050 et imprimer le contenu du registre WHO_AM_I. La description des registres nous dit qu'on doit trouver la valeur 0x34.Exercice 4 : Lire les valeurs de l'accéléromètre ACCEL_XOUT .. ACCEL_ZOUT.
Lire les registres accel_xout_h .. accel_zout_l, combiner les valeurs des registres xxx_H et xxx_L et imprimer les valeurs brutes. Attention: Il s'agit des valeurs entières 16 bits avec signe ! Convertir ces valeurs en valeurs physiques avec les unités de mg (milli g, On doit trouver des valeurs proches de zéro pour les axes x et y et proche de 1 g pour l'axe z ) --Comments



{kind=link}
{kind=link}
Ideas, requests, problems regarding TWiki? Send feedback